Welzl`s algorithm
Unreal Engine 플러그인을 제작하는 프로젝트를 진행하면서, 다수의 AI agent들을 이동시키는 과정에서 그 전체적인 형태를 개략적으로 유지시키기 위한 도구 중 하나로 agent를 모두 포함하는 외접구를 구해야 할 필요가 생겼다. 팀에서는 이 기능을 구현하기 위해 외접원(구)를 빠르게 도출할 수 있는 알고리즘인 Welzl`s algorithm을 사용하게 되었다. 나는 다른 부분의 코드를 주로 작성해서 해당 알고리즘의 정확한 동작이나 사용 이유에 대해서는 정확히는 이해하고 있지 않은 상태이기 때문에 알고리즘에 대한 이해를 하기 위해 위해 글을 통해 정리한다.
Welzl 알고리즘
Welzl 알고리즘은 임의의 점 집합 (P)에 대해 모든 점을 포함하는 최소 반지름의 원(3차원 확장 시 구)를 O(N) 정도의 시간에 구하는 알고리즘이다. 다음과 같은 아이디어로 동작한다.
- 항상 현재까지 처리한 점들을 덮는 최소 외접원을 유지한다.
- 점들을 랜덤한 순서로 섞은 뒤, 한 점씩 추가해 가며:
- 새로운 점 p가 기존 원 안에 있으면 → 이미 포함되므로 원의 변화가 없다.
- 새로운 점 p가 기존 원 밖에 있으면 → 최소 외접원의 경계(boundary) 에 반드시 p가 포함되어야 한다.
- 경계 집합 R은 현재 원을 결정하는 점들이며 2차원의 경우 최대 3개, 3차원의 경우 최대 4개의 원소로 구성된다.(원과 구의 성질)
이 구조를 재귀적으로 시행하는 구조의 알고리즘이다.
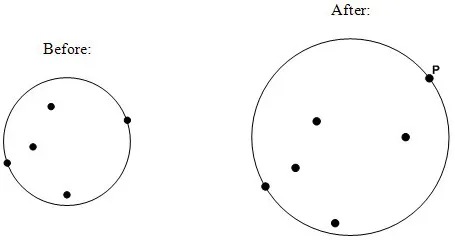
새로운 점 P가 현재까지의 최소 외접원의 바깥에 있는 경우의 예시
만약 최소 외접원을 구할 때 외접원을 이루는 집합에 대해 모두 검사하는 Brute-force방식으로 검사하면, 접 2개의 조합을 구하여 해당 조합에 대해 모든 점이 포함되는지 검사 + 점 3개의 조합을 구하여 해당 조합에 대해 모든 점이 포함되는지 검사의 로직으로 시행되어 O(N^2 * N) + O(N^3 * N) -> O(N^4) 정도의 시간 복잡도로 시행된다.
Welzl 알고리즘은 순회 자체는 1번만 하게 되어 일반적인 경우 O(N)으로 동작하여 시간적으로 효율적으로 동작한다. 확률적으로 새로운 점이 이전까지의 외접원에 포함될 확률이 높은 성질을 이용하는 방식이다. 다만 모든 점이 외접원의 경계 부근에 존재하는 등 특수한 케이스에서 재귀 시행이 늘어나며 외접구가 계속하여 갱신되는 경우 시간복잡도가 크게 증가할 수 있다.
Entry point
FCircle FFormationWelzl::GetMinimumEnclosingCircle(const TArray<FVector2D>& Points)
{
...
TArray<FVector2D> ShuffledPoints = Points;
const int32 NumPoints = ShuffledPoints.Num();
for (int32 i = NumPoints - 1; i > 0; --i)
{
const int32 j = FMath::RandRange(0, i);
ShuffledPoints.Swap(i, j);
}
return WelzlRecursive(ShuffledPoints, {});
}- 기대 (O(N)) 시간 보장을 위해 점 순서를 랜덤하게 섞는다.
- R(경계 포인트 집합)을 비운 상태에서 재귀를 시작한다.
재귀적으로 경계 집합 구하기
FCircle FFormationWelzl::WelzlRecursive(TArray<FVector2D> P, TArray<FVector2D> R)
{
if (P.Num() == 0 || R.Num() == 3) return MakeCircleFromBoundary(R);
const FVector2D p = P.Pop();
FCircle mec = WelzlRecursive(P, R);
if (FVector2D::DistSquared(mec.Center, p) < FMath::Square(mec.Radius) + KINDA_SMALL_NUMBER) return mec;
R.Add(p);
return WelzlRecursive(P, R);
}- 더 이상 처리할 점이 없거나 R에 점이 3개 있으면, R이 현재 외접원을 완전히 규정하므로
MakeCircleFromBoundary(R)을 호출한다. - 재귀적으로 다음의 동작을 수행한다.
- 집합
P에서 하나의 점p를 꺼낸다. p가 제외된 상태에서 에서 최소 외접원mec를 계산한다.p가mec안에 있으면 →mec는p를 포합한모든 점을 덮으므로 그대로 반환한다.p가mec밖에 있으면 → 최종 해의 경계에 p가 반드시 포함되어야 하므로,R에p를 추가한 뒤 다시 재귀 호출한다.
- 집합
경계 집합에서 원 구성하기
FCircle FFormationWelzl::MakeCircleFromBoundary(const TArray<FVector2D>& R)
{
const int32 NumPoints = R.Num();
if (NumPoints == 0) return FCircle();
if (NumPoints == 1) return FCircle(R, 0.f);
if (NumPoints == 2)
{
FVector2D Center = (R + R) / 2.0f;
float Radius = FVector2D::Distance(R, R) / 2.0f;
return FCircle(Center, Radius);
}
if (NumPoints == 3)
{
return MakeCircleFromThreePoints(R, R, R);
}
...
}R크기에 따라 케이스 분류- 0~1개: 예외 처리, 기본 원.
- 2개: 두 점을 지름으로 하는 원.
- 3개: 세 점의 외접원 구하기.
세 점의 외접원
FCircle FFormationWelzl::MakeCircleFromThreePoints(const FVector2D& P1, const FVector2D& P2, const FVector2D& P3)
{
const float D = 2.0f * (P1.X * (P2.Y - P3.Y) + P2.X * (P3.Y - P1.Y) + P3.X * (P1.Y - P2.Y));
if (FMath::Abs(D) < KINDA_SMALL_NUMBER)
{
const float d12 = FVector2D::DistSquared(P1, P2);
const float d13 = FVector2D::DistSquared(P1, P3);
const float d23 = FVector2D::DistSquared(P2, P3);
if (d12 >= d13 && d12 >= d23)
return FCircle((P1 + P2) / 2.0f, FVector2D::Distance(P1, P2) / 2.0f);
if (d13 >= d12 && d13 >= d23)
return FCircle((P1 + P3) / 2.0f, FVector2D::Distance(P1, P3) / 2.0f);
return FCircle((P2 + P3) / 2.0f, FVector2D::Distance(P2, P3) / 2.0f);
}
const float P1_sq = P1.SizeSquared();
const float P2_sq = P2.SizeSquared();
const float P3_sq = P3.SizeSquared();
const float CenterX = (P1_sq * (P2.Y - P3.Y) + P2_sq * (P3.Y - P1.Y) + P3_sq * (P1.Y - P2.Y)) / D;
const float CenterY = (P1_sq * (P3.X - P2.X) + P2_sq * (P1.X - P3.X) + P3_sq * (P2.X - P1.X)) / D;
FVector2D Center(CenterX, CenterY);
float Radius = FVector2D::Distance(Center, P1);
return FCircle(Center, Radius);
}- D는 세 점이 만드는 행렬식의 2배값으로 0에 가깝다면 세 점이 colinear하다. 이 경우 최소 외접원은 가장 멀리 떨어진 두 점을 지름으로 하는 원이다.
- 그렇지 않다면, 세 점의 외접원 공식으로 중심과 반지름을 계산한다.
나머지는 해당 로직을 3차원으로 확장한 코드로 기본적인 방식은 크게 다르지 않다.
BOJ에서 해당 알고리즘을 사용한 문제를 풀어볼 수 있다. BOJ 2389 - 세상의 중심에서…
이 문제는 Brute-force로도 풀리지만 위 내용과 동일한 방식으로 작성해 볼 수 있다.
#include <bits/stdc++.h>
using namespace std;
const long double EPS = 1e-12L;
struct Point {
long double x, y;
};
struct Circle {
Point c;
long double r;
Circle() : c{0, 0}, r(0) {}
Circle(Point _c, long double _r) : c(_c), r(_r) {}
};
long double dist2(const Point& a, const Point& b) {
long double dx = a.x - b.x;
long double dy = a.y - b.y;
return dx * dx + dy * dy;
}
Circle circleFromTwoPoints(const Point& A, const Point& B) {
Point center{ (A.x + B.x) / 2.0L, (A.y + B.y) / 2.0L };
long double r = sqrtl(dist2(A, B)) / 2.0L;
return Circle(center, r);
}
Circle circleFromThreePoints(const Point& A, const Point& B, const Point& C) {
long double D = 2.0L * (A.x * (B.y - C.y) + B.x * (C.y - A.y) + C.x * (A.y - B.y));
if (fabsl(D) < EPS) {
long double dAB = dist2(A, B);
long double dAC = dist2(A, C);
long double dBC = dist2(B, C);
if (dAB >= dAC && dAB >= dBC) return circleFromTwoPoints(A, B);
if (dAC >= dAB && dAC >= dBC) return circleFromTwoPoints(A, C);
return circleFromTwoPoints(B, C);
}
long double A_sq = A.x * A.x + A.y * A.y;
long double B_sq = B.x * B.x + B.y * B.y;
long double C_sq = C.x * C.x + C.y * C.y;
long double CenterX = (A_sq * (B.y - C.y) + B_sq * (C.y - A.y) + C_sq * (A.y - B.y)) / D;
long double CenterY = (A_sq * (C.x - B.x) + B_sq * (A.x - C.x) + C_sq * (B.x - A.x)) / D;
Point center{ CenterX, CenterY };
long double r = sqrtl(dist2(center, A));
return Circle(center, r);
}
Circle makeCircleFromBoundary(const vector<Point>& R) {
if (R.empty()) return Circle();
if (R.size() == 1) return Circle(R[0], 0.0L);
if (R.size() == 2) return circleFromTwoPoints(R[0], R[1]);
if (R.size() == 3) return circleFromThreePoints(R[0], R[1], R[2]);
return Circle();
}
Circle welzlRecursive(vector<Point>& P, vector<Point> R, int n) {
if (n == 0 || R.size() == 3) {
return makeCircleFromBoundary(R);
}
Point p = P[n - 1];
Circle mec = welzlRecursive(P, R, n - 1);
long double d2 = dist2(mec.c, p);
if (d2 <= mec.r * mec.r + 1e-12L) {
return mec;
}
R.push_back(p);
return welzlRecursive(P, R, n - 1);
}
Circle minimumEnclosingCircle(vector<Point> pts) {
if (pts.empty()) return Circle();
random_device rd;
mt19937 rng(rd());
shuffle(pts.begin(), pts.end(), rng);
vector<Point> R;
return welzlRecursive(pts, R, (int)pts.size());
}
int main() {
ios::sync_with_stdio(false); cin.tie(NULL);
int N; cin >> N;
vector<Point> pts(N);
for (int i = 0; i < N; ++i) {
cin >> pts[i].x >> pts[i].y;
}
Circle c = minimumEnclosingCircle(pts);
cout << fixed << setprecision(10);
cout << (double)c.c.x << ' ' << (double)c.c.y << ' ' << (double)c.r << '\n';
return 0;
}References
[https://en.wikipedia.org/wiki/Smallest-circle_problem]
[https://www.gamedev.net/reference/articles/article2484.asp]